
El trabajo tiene aplicaciones tanto para la robótica blanda como para las tecnologías biomédicas. El trabajo se basa en el arte del kirigami, que consiste en cortar y plegar hojas de material bidimensionales (2D) para formar formas tridimensionales (3D).
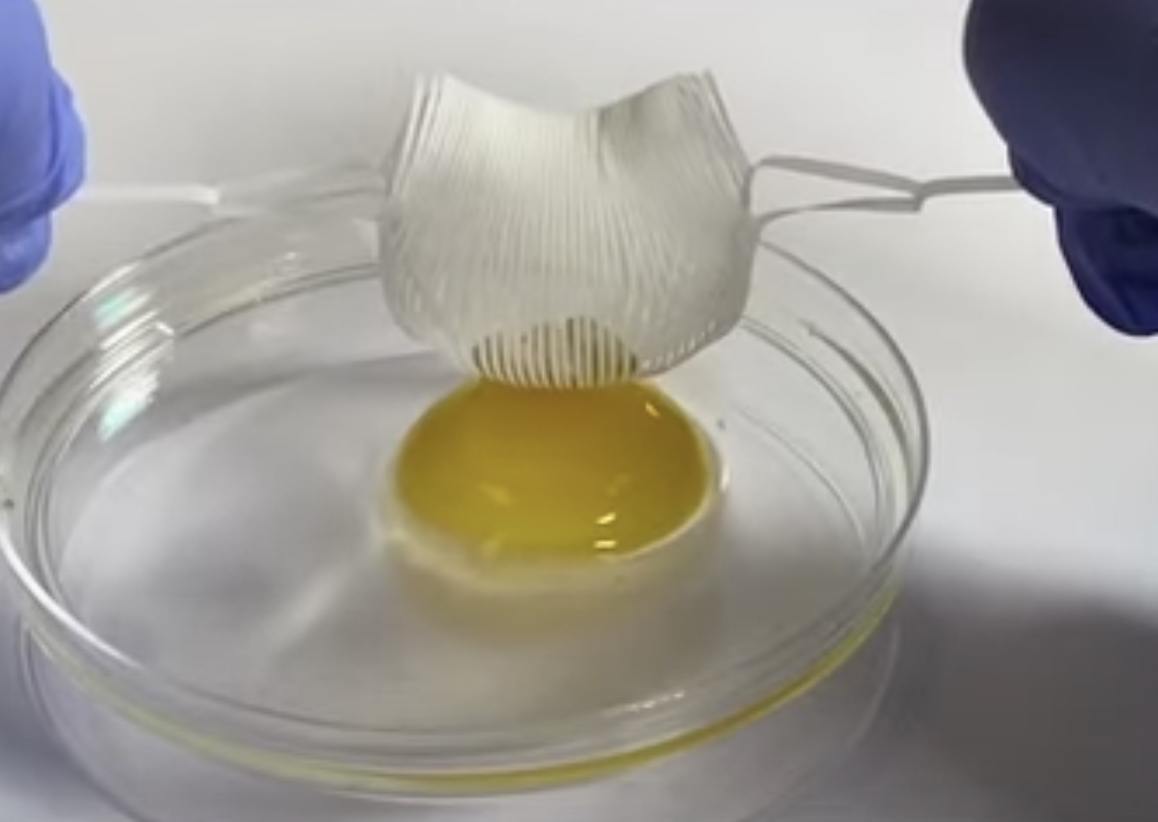
Específicamente, los investigadores han desarrollado una nueva técnica que implica el uso de kirigami para convertir láminas 2D en estructuras 3D curvas cortando ranuras paralelas en gran parte del material. El límite exterior del material determina en gran parte la forma final de la estructura 3D. Por ejemplo, un material 2D que tiene un límite circular formaría una forma 3D esférica.
“Hemos definido y demostrado un modelo que permite a los usuarios trabajar hacia atrás”, dice Yaoye Hong, estudiante de doctorado en la Universidad Estatal de Carolina del Norte y primer autor del artículo en Nature Communications. “Si los usuarios saben qué tipo de estructura 3D curva necesitan, pueden usar nuestro enfoque para determinar la forma del límite y el patrón de las rendijas que necesitan usar en el material 2D. Y el control adicional de la estructura final es posible al controlar la dirección en la que se empuja o tira del material”.
Fuente: Matt Shipman – NC | Futurity
Para leer más ingresa a: https://www.futurity.org/robotic-gripper-kirigami-2687662/?utm_source=rss&utm_medium=rss&utm_campaign=robotic-gripper-kirigami-2687662