
En enero, los investigadores mostraron las habilidades culinarias de un robot ama de casa de código abierto Aloha. Ahora el proyecto Unleashed se dedica a anudar cordones de zapatos, colgar camisas e incluso reparar otros robots.
El proyecto Aloha Unleashed incluye al estudiante de doctorado de Stanford Tony Z. Zhao y la profesora asistente Chelsea Finn del equipo Mobile Aloha, junto con un grupo de robóticos del laboratorio Google DeepMind.
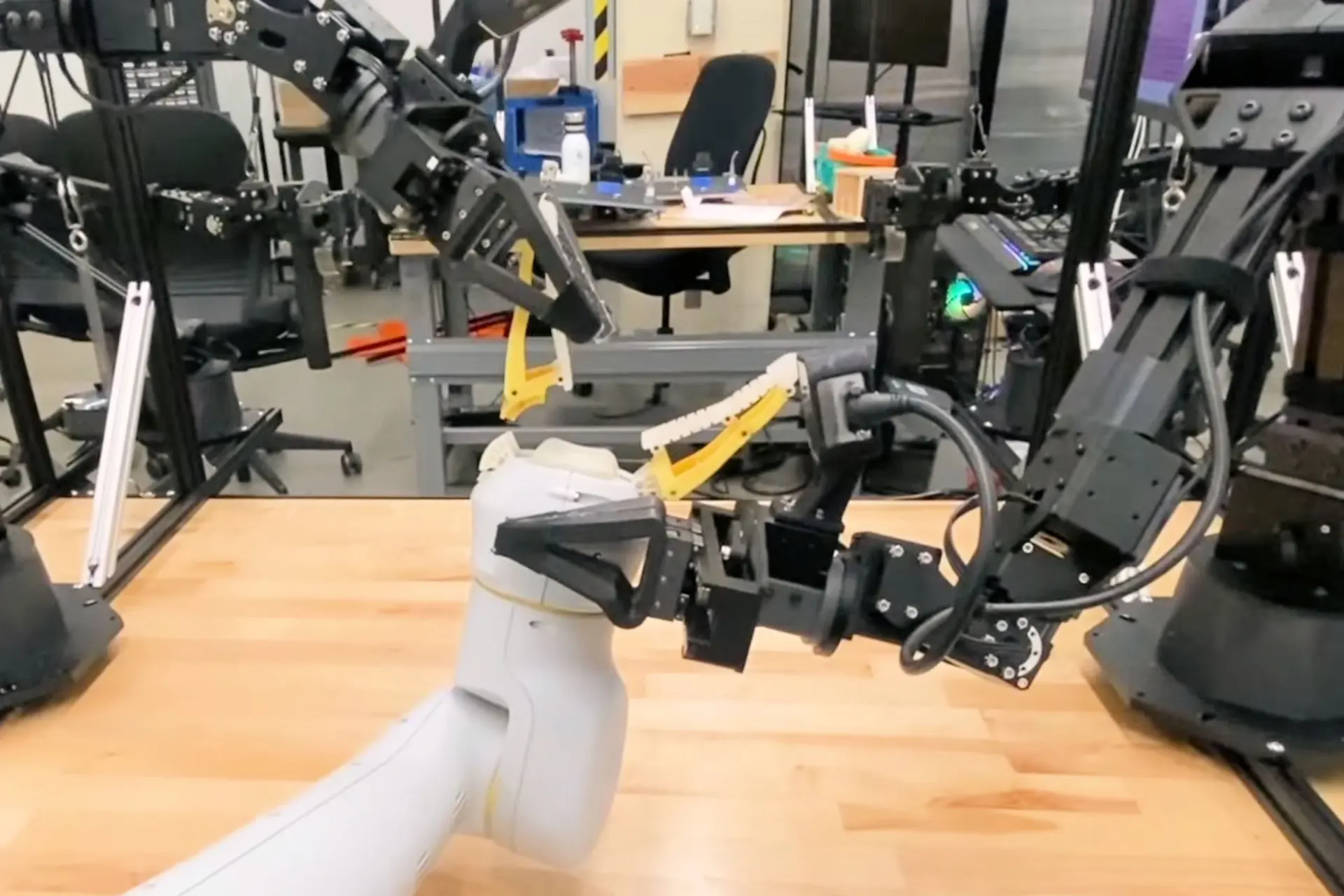
El grupo de investigación utiliza pares enfrentados de brazos manipuladores Aloha 2, que fueron desarrollados para mejorar el rendimiento y la durabilidad del modelo Aloha original y al mismo tiempo permitir la «recopilación de datos a escala de flota en tareas más complejas».
Las mejoras incluyen reemplazar el mecanismo de tijera de las pinzas antiguas con un riel de baja fricción para permitir agarrar objetos más pequeños, cámaras RealSense más pequeñas con un campo de visión más amplio, una configuración de compensación pasiva de la gravedad hecha a partir de componentes disponibles en el mercado para apoyar al líder brazos para teleoperación y un marco de escritorio fabricado en aluminio con una cámara de visión en lo alto. El equipo también desarrolló un nuevo modelo de simulación con mayor precisión y mejores imágenes para ayudar con las tareas de aprendizaje.
Los investigadores han estado «impulsando la escala y la destreza de las tareas en nuestra flota Aloha 2» durante el último año, y ahora han publicado una serie de vídeos que muestran la configuración de doble brazo realizando tareas de forma autónoma, mientras se adapta a resbalones y problemas de colocación en tiempo real.
Fuente: New Atlas | Paul Ridden
Para leer más ingresa a:
https://newatlas.com/robotics/stanford-deepmind-aloha-unleashed/